 Connections¶
Connections¶
Here the Input/Output ports of the autopilot can be configured. Depending on the configurable port selected the user will need to provide different parameters.
Each connection is associated with a specific pin number. For more details see the section Hardware Installation - Electrical .
ADC¶
ADC stands for Analog-to-Digital Converter. This connection is used by analog sensors. These sensors provide a voltage readout that needs to be converted into the actual measured vairable, e.g. temperature, fuel volume, etc.
1x autopilot is equipped with 5 connections of this kind. Every ADC connection that is set requires an integer variable associated where the voltage readout will be stored. The maximum voltage of the ADC connection is 3.3 V.
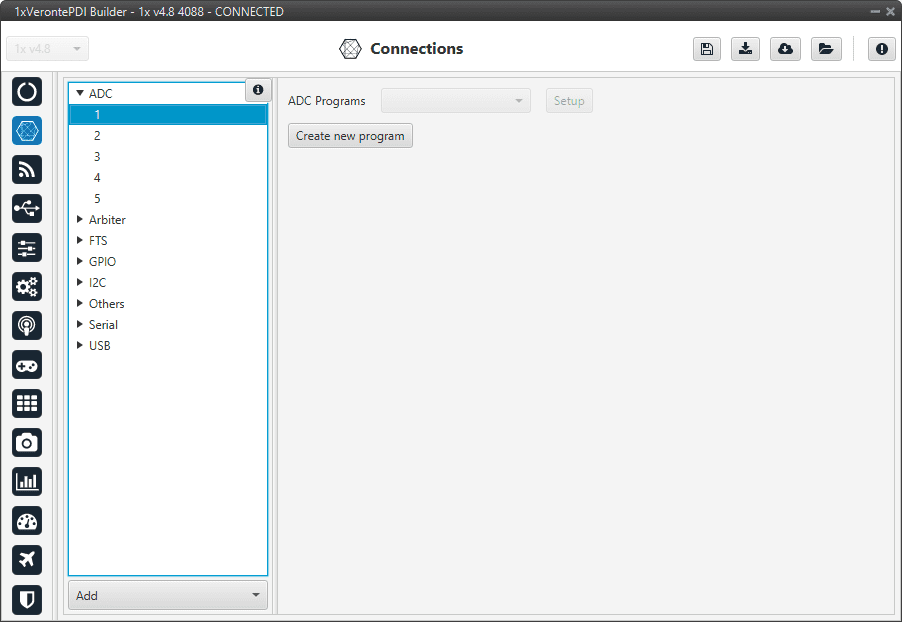
ADC menu¶
To convert the input ADC value to the physical variable it represents the user needs to create a new program. See more information about programs in the Block Programs section.
Application example
Let us consider a Fuel Level Sensor whose datasheet provides a direct relation of the voltage readout and the fuel volume (in L) through the polynomial \(y=-0.0498x^4+0.3002x^3-0.3083x^2+1.2423x+0.15\), where \(y\) is the fuel volume and \(x\) is the sensor voltage.
Creating a new program, the above equation can be reproduced. An example of how to do it is presented below.
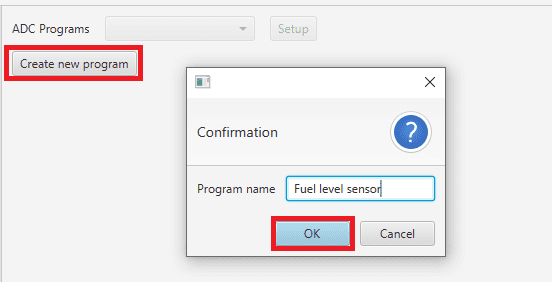
Create ADC program¶
When the ADC program is created, a default block program is also created.
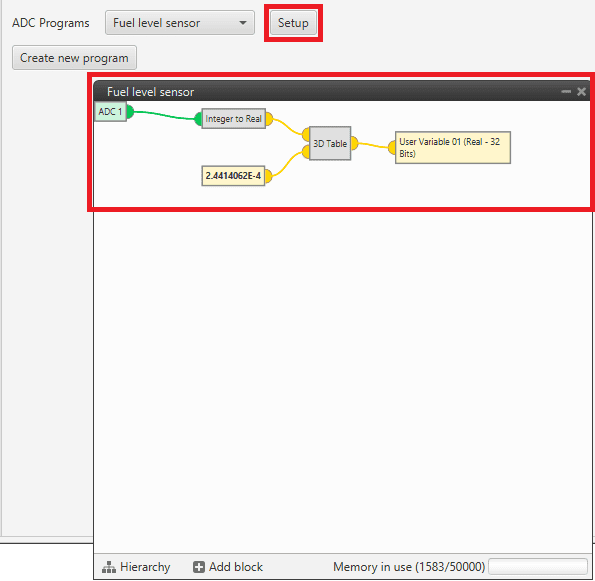
ADC default program¶
Now, the program has to be customised for this application. See more information about programs in the Block Programs section.
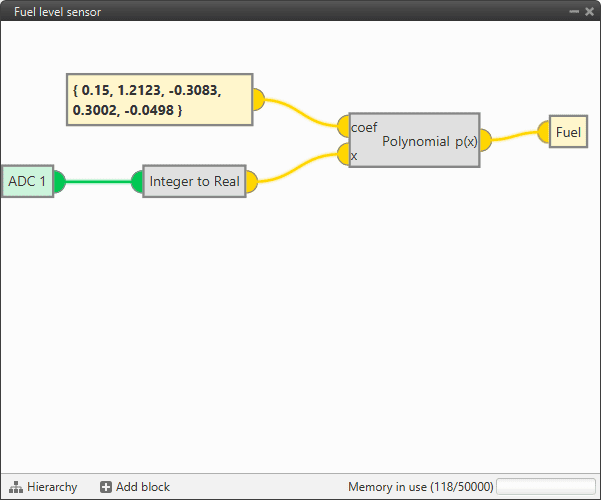
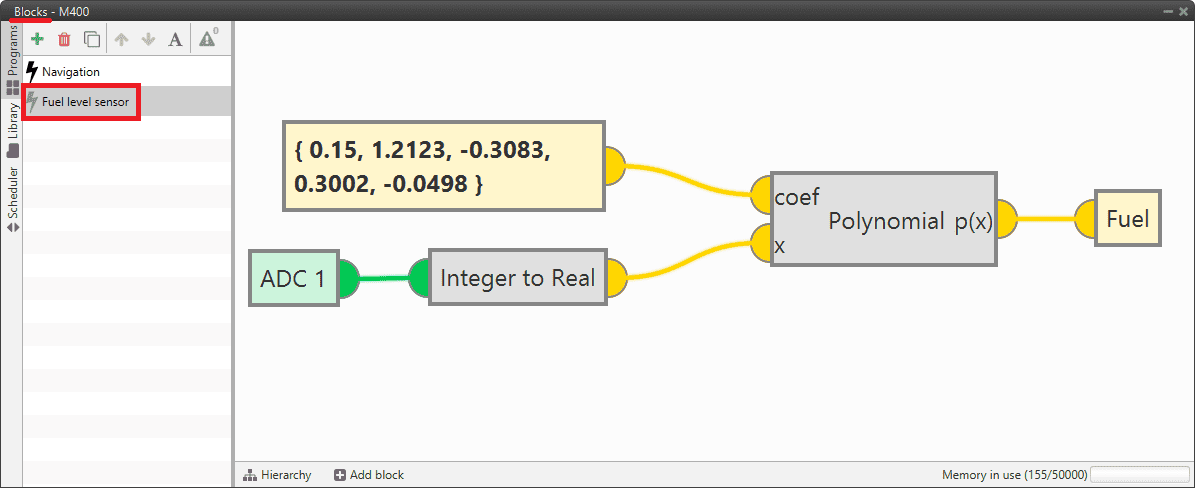
ADC conversion for a Fuel Level Sensor¶
The fuel remaining in the tank is saved in a user variable, which can be used for displaying or warning purposes.
Note
The ADC variable is first converted from integer to real, and then the polynomial is applied.
This program can now be modified by clicking in ‘Setup’ in this menu or in the Block Programs section.
ADC program in Block Programs¶
Arbiter¶
Pins 45 and 46 are dedicated pins to allow the UART communication with the Safety micro Controller (SuC). This microcrollers is in charge of monitoring the state of the main microcontroller and providing the Flight Termination Signals (FTS).
Arbiter menu¶
FTS¶
The FTS (Flight Termination System) is a signal that is activated when a sytem error occurs (System Error bit is False). There’s a group of bits that when failed cause the system error, to see more about the condition that make the system error happen, go to Activation system error bits section of the 1x Software Manual.
FTS menu¶
Pins 42 and 43 are related to the FTS:
Pin 42: Deadman signal from comicro, monitors main MPU encoding its product-level bit. This signal is a square wave at [100,125] Hz. It can be higher at rebooting (about 300-400Hz) but should never be less than 100Hz.
Pin 43: !SystemOK Bit. 0 when Ok (no failure detected) and 1 (high, 3.3 V) when an error is detected. This pin goes high if the deadman signal sent by the MPU (main processor unit) is lower than 63Hz. That means there is a critical error.
GPIO¶
Output pins produce PWM or GPIO signals that are used to move the different servos and actuators of the platform.
A GPIO (General Purpose Input/Output) is a generic pin that can be configured as an input or output pin. When this option is configured as an output pin, the value sent will be different from the one sent if it was a PWM.
GPIO pins admit up to 4 different states:
ON: A continuous signal of value 1, made by 3.3V.
OFF: A continuous signal of value 0, made by Ground.
PULSE ON: A single pulse of value 1, with a width specified in seconds.
PULSE OFF: A single pulse of value 0, with a width specified in seconds.
The configuration of the pin output value is done with an Output action in the Automations menu.
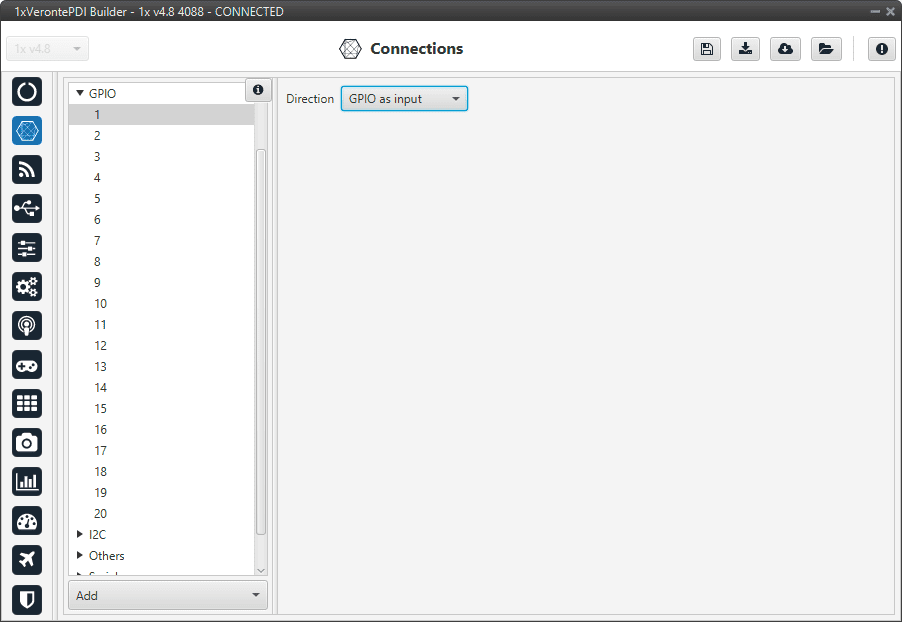
GPIO menu¶
1x autopilot admits up to 20 I/O PWM/GPIO signals. To configure a pin as GPIO after it has been changed to PWM, click Add and select GPIO:
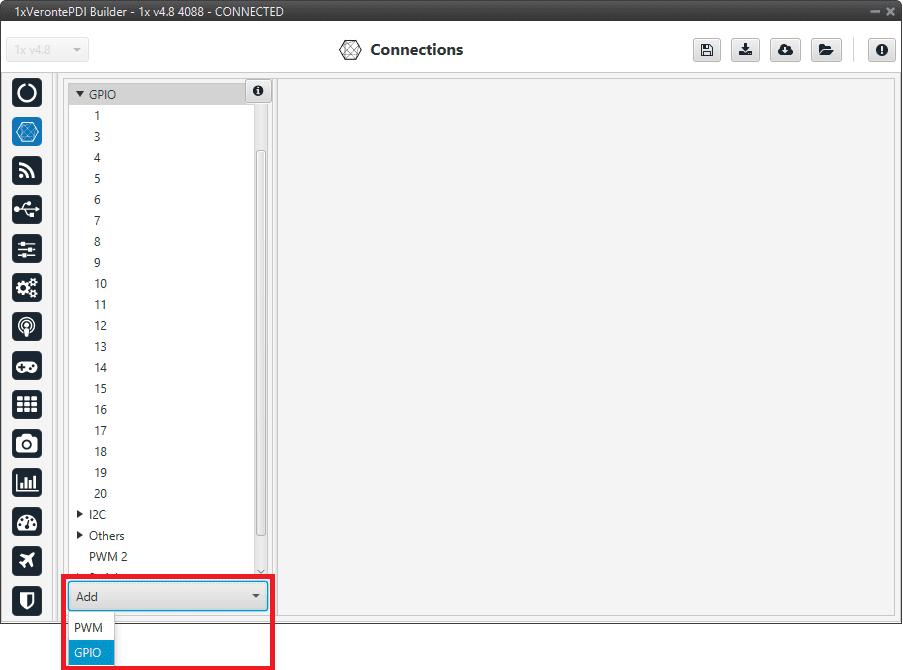
Add GPIO¶
I2C¶
I2C stands for Inter-Integrated Circuit bus. It is a bus interface connection protocol incorporated into devices for serial communication. It operates in 2 modes: master and slave.
I2C uses only 2 bi-directional open-drain lines for data communication called SDA and SCL. Both these lines are pulled high.
Pin 31 - SCL: Clock line for I2C bus (0.3V to 3.3V), it carries the clock signal.
Pin 32 - SDA: Data line for I2C bus (0.3V to 3.3V), transfer of data takes place through this pin.
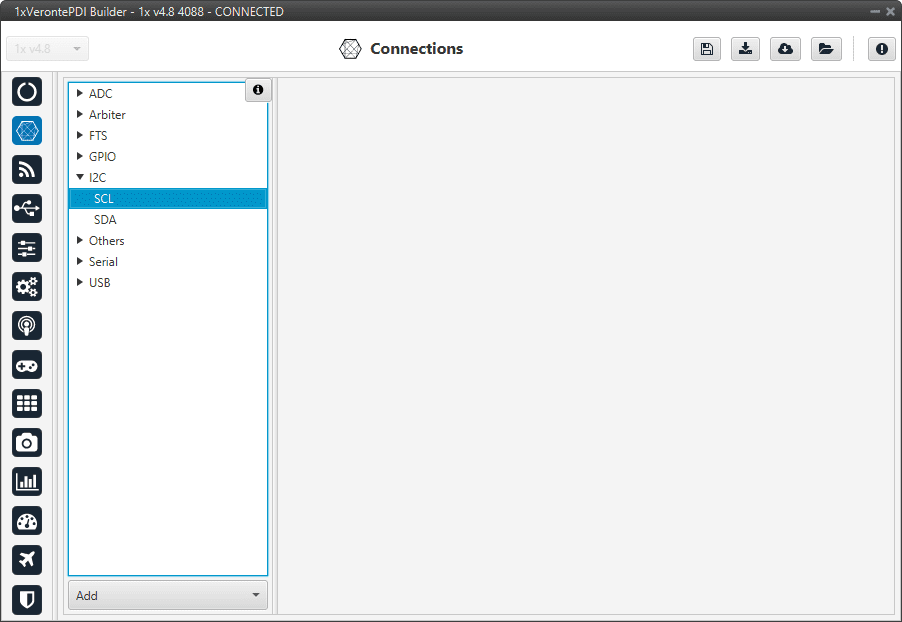
I2C menu¶
Others¶
GND: Ground.
Power.
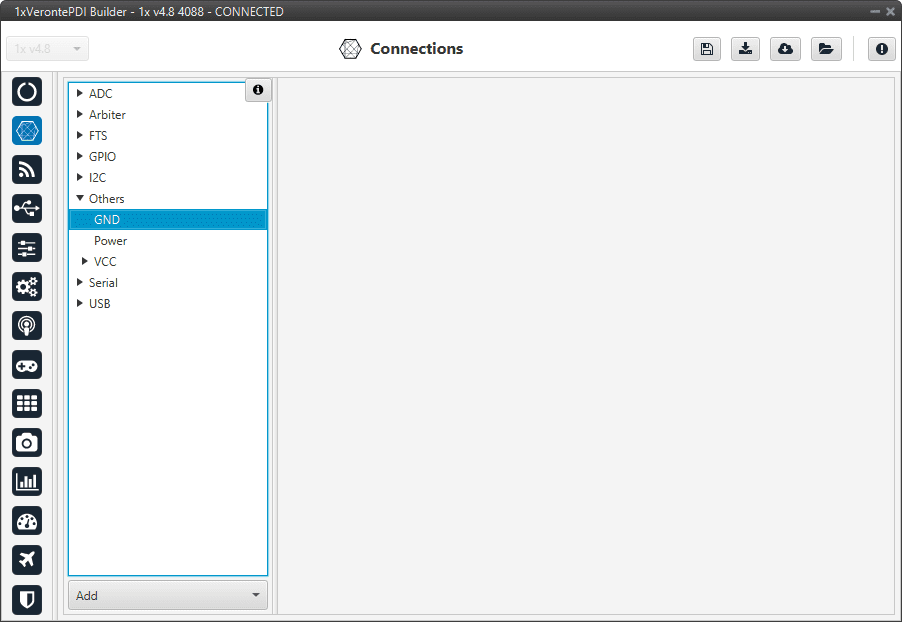
Others menu¶
PWM¶
Output pins produce PWM or GPIO signals that are used to move the different servos and actuators of the platform.
The acronym PWM corresponds to Pulse Width Modulation. 1x sends a pulse with a certain width that is received by the servo/actuator, and according to the width of such pulse, it changes its behaviour. A wide pulse will correspond to a big movement and a narrow one to a small movement.
By default, all PWM/GPIO pins are configured as GPIO output. So, to configure them as PWM, it is necessary to click Add:
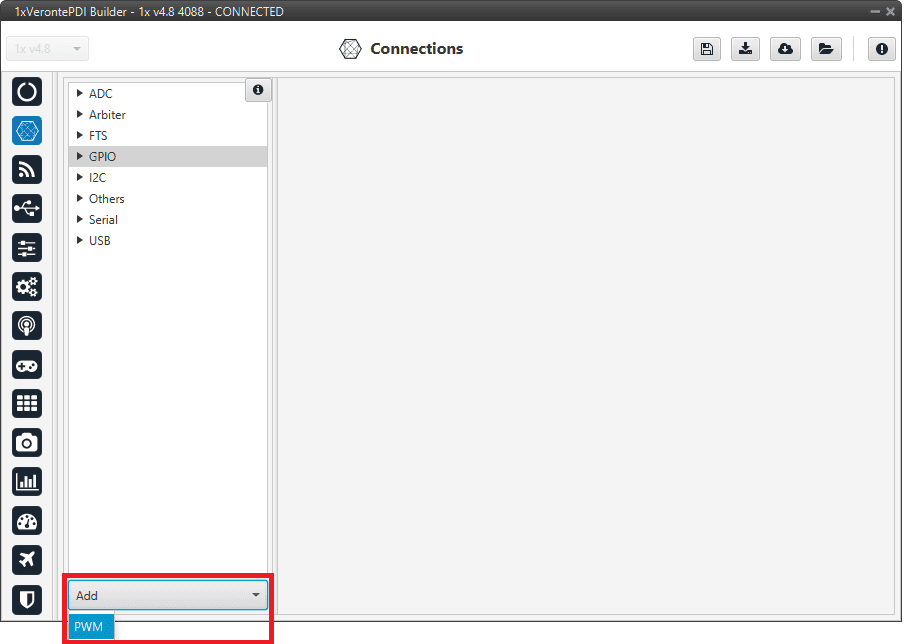
Add PWM¶
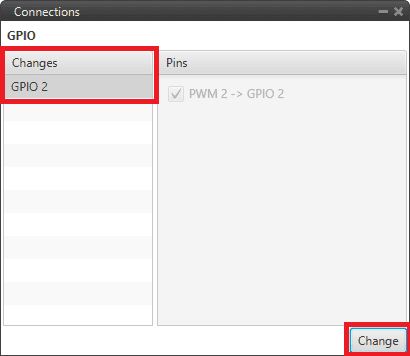
Then, select the GPIO pin the user want to change to PWM. As can be seen, pins are interchangeable.
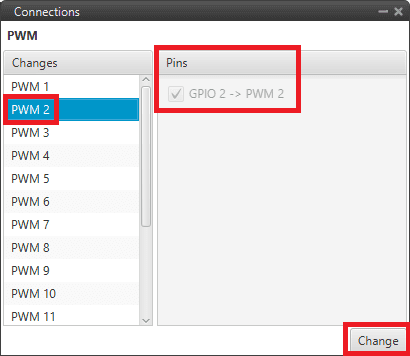
PWM change¶
As shown in the image below, the GPIO 2 output is now missing as it has been changed to a PWM output.
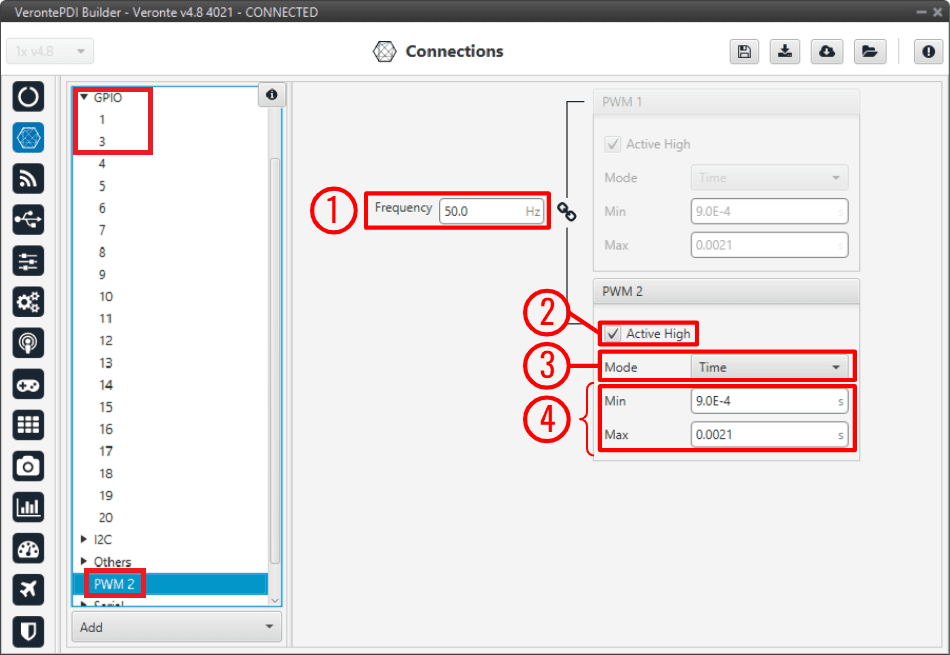
PWM menu¶
In this menu the following parameters can be configured:
Frequency: This option determines the period of the pulses sent by the autopilot. The PWM is built in pairs inside the autopilot, and that is why the frequency is indicated in pairs, i.e when the frequency of PWM 1 is changed, the one of PWM 2 also changes. The following table shows the PMW pairs as configured in 1x autopilot.
PWM Pairs |
|
|---|---|
PWM 1 |
PWM 2 |
PWM 3 |
PWM 4 |
PWM 5 |
PWM 6 |
PWM 7 |
PWM 8 |
PWM 9 |
PWM 10 |
PWM 11 |
PWM 12 |
PWM 13 |
PWM 14 |
PWM 15 |
PWM 16 |
PWM 17 |
PWM 18 |
PWM 19 |
PWM 20 |
Active High: Enable/disable. Polarity high or low.
Mode: The options available are Time and Duty cycle. The second option is a a different way of indicating the pulse width. Now the value indicated is a percentage which corresponds to the relation between the pulse width over the total period of the sent signal. So a 100% duty cycle will correspond to a signal with a constant value of 1, while a 0% duty cycle implies a constant signal with value 0. Between this two extremes, the pulse width can vary as in the examples shown in the following figure.
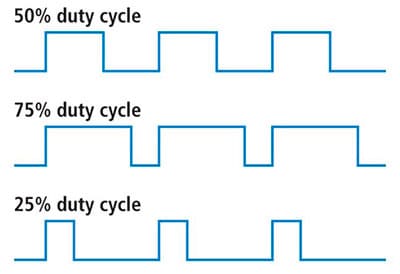
Duty Cycle¶
Min/Max: These parameters are the pulse width values that will make the servo/actuator go to its lowest and highest position. As an example let’s consider the servo of an aircraft elevator, a pulse sent by 1x autopilot of 0.9 ms will correspond with the lowest point of the servo range (-30 degrees for example). On the other hand, a pulse of 2.1 ms will make the servo go to its top position (for example 30 degrees).
Summary
A PWM is a signal which consists of a series of pulses having a width determined by a percentage over a range specified by the parameters Min and Max. On the other hand, the GPIO is a signal with a constant value (1,0) or with a single pulse (1,0).
Serial¶
Two serial interfaces are available with 1x autopilot, 1 port RS-232 and 1 port RS-485, however more can be added by using a CEX. Each one of the serial interfaces is associated with a set of pins.
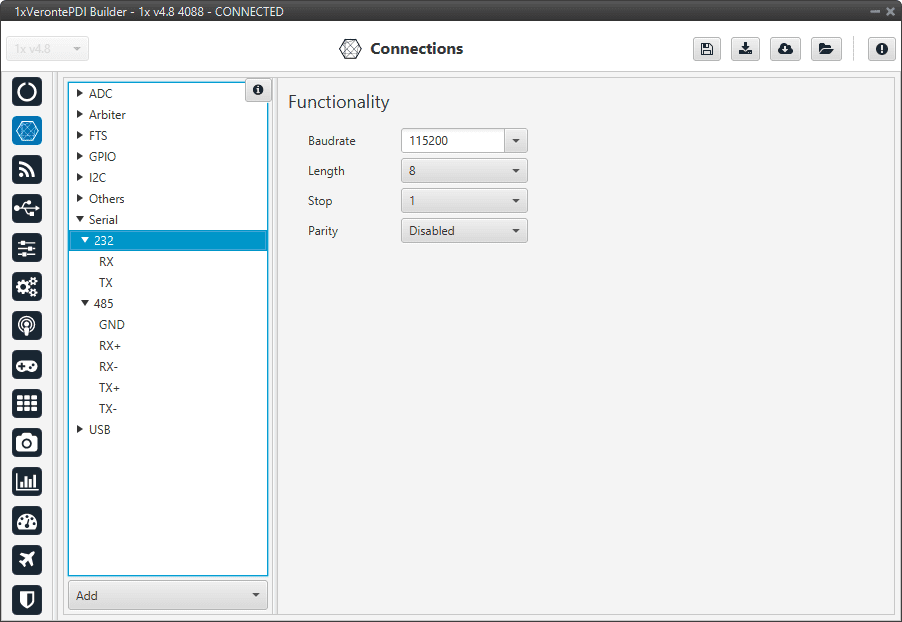
Serial menu¶
The following fields can be configured:
Baudrate: This specifies how fast data is sent over a serial line.
Length: This defines the number of data bits in each character: 4 to 8.
Stop: Stop bits sent at the end of every character: 1, 1.5, 2.
Parity: Is a method of detecting errors in transmission. When parity is used with a serial port, an extra data bit is sent with each data character, arranged so that the number of 1 bits in each character, including the parity bit. Disabled, odd or even.
Note
All these settings are already specified for a given device, therefore, 1x autopilot should match with them in order to be able to communicate.
Compatibility table:
Port name |
RS-232 |
RS-422 / RS-485 |
|---|---|---|
Transfer type |
Full duplex |
Full duplex / Half Full duplex |
Maximum distance |
15 meters at 9600 bps |
1200 meters at 9600 bps |
Topology |
Point to point |
Point to point / Multi point |
Max number of devices |
1 |
1-10 in receive mode / 32 |
USB¶
USB menu¶